别整 openclaw 了,spacebot 才是你的梦中情 bot
/ 20 分钟阅读
目录
别整 openclaw 了,spacebot 才是你的梦中情 bot
核心结论:openclaw 串行阻塞,执行时对话冻结,内部状态黑盒;spacebot 五层进程并发互不阻塞,知识图谱记忆带可信度评分,Worker 在跑时你照样能聊天。同等自托管场景下,spacebot 响应更快、记忆更可靠、部署更简单——开源免费,单一二进制,
cargo build后直接跑。
你以为自建 AI bot 难,其实是你选错了工具
折腾族有一种通病:看到 GitHub 上 star 数够多、README 写得够长,就默认”这个应该可以”,然后一头扎进去,花两个周末配环境、踩坑、debug,最后跑起来一个勉强能用的东西,告诉自己”差不多够用了”。
openclaw 就是这种故事的标准剧本。
它的主页看起来非常有诚意:支持 WhatsApp、Telegram、Slack、Discord、Google Chat、Signal、iMessage、Microsoft Teams、Matrix、Zalo……十几个平台,密密麻麻地列在 README 里,让人产生一种”这就是我要找的全能助手”的幻觉。
npm install -g openclaw,一行装好,文档齐全,社区活跃。
然后你真的开始用了。
你发一条消息,让它帮你搜点资料。
Bot 回了”好的,正在处理……”
然后——沉默。
你等了五秒。又发了一条”还在吗?”
没有回应。
等到它终于回来,你已经开了三个新标签页自己去查了。
这不是个例,这是 openclaw 的工作模型决定的:它是串行的,执行任务时对话是冻结的。你在等一个不知道进展到哪里的黑盒跑完。
这个体验有个名字,叫做:令人窒息的等待感。
如果你也有过这种感受,我们聊聊 spacebot。
openclaw 的问题,比你想的更根本
先说清楚,openclaw 不是”差”,它是”将就”。将就在当你需求简单的时候,它的确够用。但一旦你想真正把 AI bot 作为生产力工具,它的天花板会让你很快撞头。
问题一:Node.js 的历史包袱
openclaw 的整个技术栈建在 Node.js + TypeScript 上。这个选择最大的优点是”开发者熟悉”,最大的缺点也是同一套技术栈带来的:运行时重,内存占用高,单线程事件循环决定了它的并发上限。
你装好之后会发现,光是 node_modules 目录就能让你磁盘占用跳一下。启动时间也不短,尤其在低配 VPS 上,第一次冷启动会让你怀疑它是不是挂了。
问题二:本地网关是个甜蜜陷阱
openclaw 的架构核心是一个本地 WebSocket 网关,跑在 ws://127.0.0.1:18789。听起来”轻量”,实际上意味着所有的进程管理、端口管理、崩溃重启,都得你自己搞。
想多设备接入?你要额外配 Tailscale 或者反代。进程挂了?你要写 systemd service 或者 pm2 配置。端口冲突?祝你排查顺利。
这是一种把复杂度下推给用户的架构设计,包装成了”灵活可定制”。
问题三:执行时的感知断裂
这是最核心的问题。当 openclaw 在执行一个工具调用时,整个响应链路是阻塞的。
你不知道它在做什么,是在搜索?是在写文件?是卡死了?是网络超时了?全部未知。你唯一能做的就是等,等到它自己回来,给你一个结果,或者一个报错。
更糟的是,在它执行期间你发的消息,很可能就消失在时间线里了,等 bot 回过头来,它不知道你问过什么。
这不叫 AI agent,这叫”定时轮询的自动回复机器”。
认识 spacebot:团队的 AI 操作系统
先说一个细节:spacebot 的官网标题不是 “AI Bot”,也不是 “AI Assistant”,而是:
Spacebot — AI Operating System for Teams
这个定位差异很重要。它不是帮你回几条消息的玩具,而是把 AI agent 当成一个操作系统级的基础设施来做——有调度器、有内存管理、有进程隔离、有权限系统,缺的只是一个内核 logo。
它用 Rust 写成,部署形态是单一二进制,面向团队和多用户并发场景设计。
官方给的核心承诺只有一句话:
Thinks, executes, and responds — concurrently, not sequentially. Never blocks. Never forgets.
翻译过来就是:思考、执行、响应,同时进行,互不阻塞,永不遗忘。
这不是营销文案,是对架构的约束。下面逐层拆解。
亮点一:流畅——它从不让你等
三层 Agent 模型,各司其职
spacebot 内部把一个对话拆成三大类进程,共五个角色:
Channel(频道层):和用户直接交互的那个”人格”。永远在线,永远响应,有自己的 soul 和 identity,绝对不会因为后台在跑任务而失联。职责是接收消息、维持对话人格、调度后续动作。
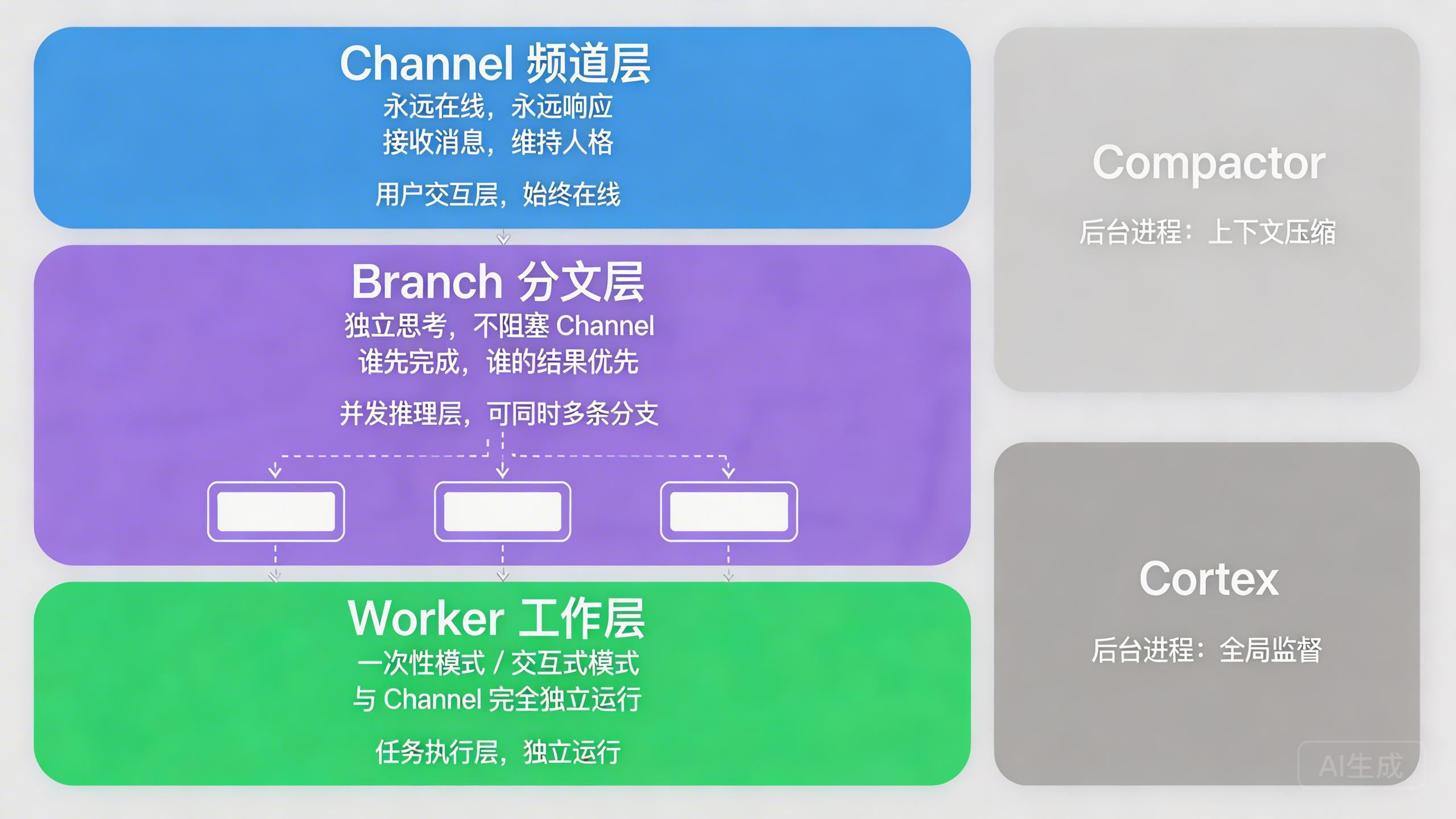
Branch(分支层):当 Channel 判断一个问题需要更深度的推理时,它会克隆出一个 Branch。Branch 继承完整对话上下文,独立思考,不阻塞 Channel。可以同时有多条 Branch 并发运行——谁先完成,谁的结果优先被采用,其余自动丢弃。
Worker(工作层):执行具体任务的进程,有两种模式:
- 一次性模式:发出去,有结果回来,任务完成。适合搜索、总结、文件操作。
- 交互式模式:支持 follow-up 输入,有 LSP 感知的编码会话。适合需要来回确认的复杂任务。
Worker 和 Channel 完全独立运行,Worker 在跑,Channel 照样接你的消息。
另外还有两个后台进程:
- Compactor(压缩层):监控上下文长度,>80% 后台压缩,>85% 积极压缩,>95% 紧急截断,全程不打扰主对话
- Cortex(皮层):全局监督,稍后详细介绍
消息合并:它读得懂你的节奏
当你连续快速发多条消息时,spacebot 不会傻傻地对每条消息单独生成回复,而是把它们批量合并成一个 LLM 请求,连同时间戳上下文一起发出去,让 agent 读懂你在说什么。
这个设计防止了”回复风暴”——你在打字的时候,bot 不会不停地插嘴说”好的”、“收到”、“明白了”。系统可以自动检测 DM 场景并绕过合并,保证私聊的即时感。
实际体验差距
有一个官网用户评价说得很直接:
“spacebot replies so much faster than openclaw”
这不是空话。openclaw 执行任务时你只能盯着光标发呆,发的消息也不知道有没有被接收。spacebot 执行任务时,你们还能继续聊,甚至可以插入新的任务,它会排好队依次处理。
亮点二:透明——你知道它在干什么的每一秒
AI agent 的信任危机
用 AI agent 最让人抓狂的时刻,是你不确定它是不是”真的在干活”。
转圈动画可以是真实处理,也可以是程序挂死后的假动作。“正在思考…”可以是深度推理,也可以是 API 超时后的等待。你没有任何依据区分这两种状态。
这种不确定感,是对 AI agent 不信任的根本来源。
spacebot 选择了完全相反的路子:把 agent 的内部状态完整暴露给用户。
你在 UI 里能看到什么
打开 spacebot 的 Web UI,你会看到的不是一个简洁的聊天框,而是一个可观察的 agent 控制台:
进程状态:当前有几个 Worker 在跑、每个 Worker 在做什么任务、有多少条 Branch 还在推理中。不是一个模糊的”处理中”,是实实在在的进程列表,你可以一眼看到整个系统的负载状态。
知识图谱记忆:spacebot 的记忆系统不是把聊天记录堆在一起,而是一个结构化的知识图谱,包含 8 种具体类型:
| 类型 | 含义 |
|---|---|
| Fact | 学到的事实信息 |
| Preference | 你表达过的偏好 |
| Decision | 已经做出的决策 |
| Identity | agent 的自我认知 |
| Event | 发生过的事情 |
| Observation | 检测到的规律和模式 |
| Goal | 正在追求的目标 |
| Todo | 待完成的任务 |
每条记忆不是孤立的,而是通过图边连接:RelatedTo(相关)、Updates(更新)、Contradicts(矛盾)、CausedBy(因果)、PartOf(从属)。这意味着 agent 不只是”记住了这件事”,而是知道这件事和其他事情的关系。
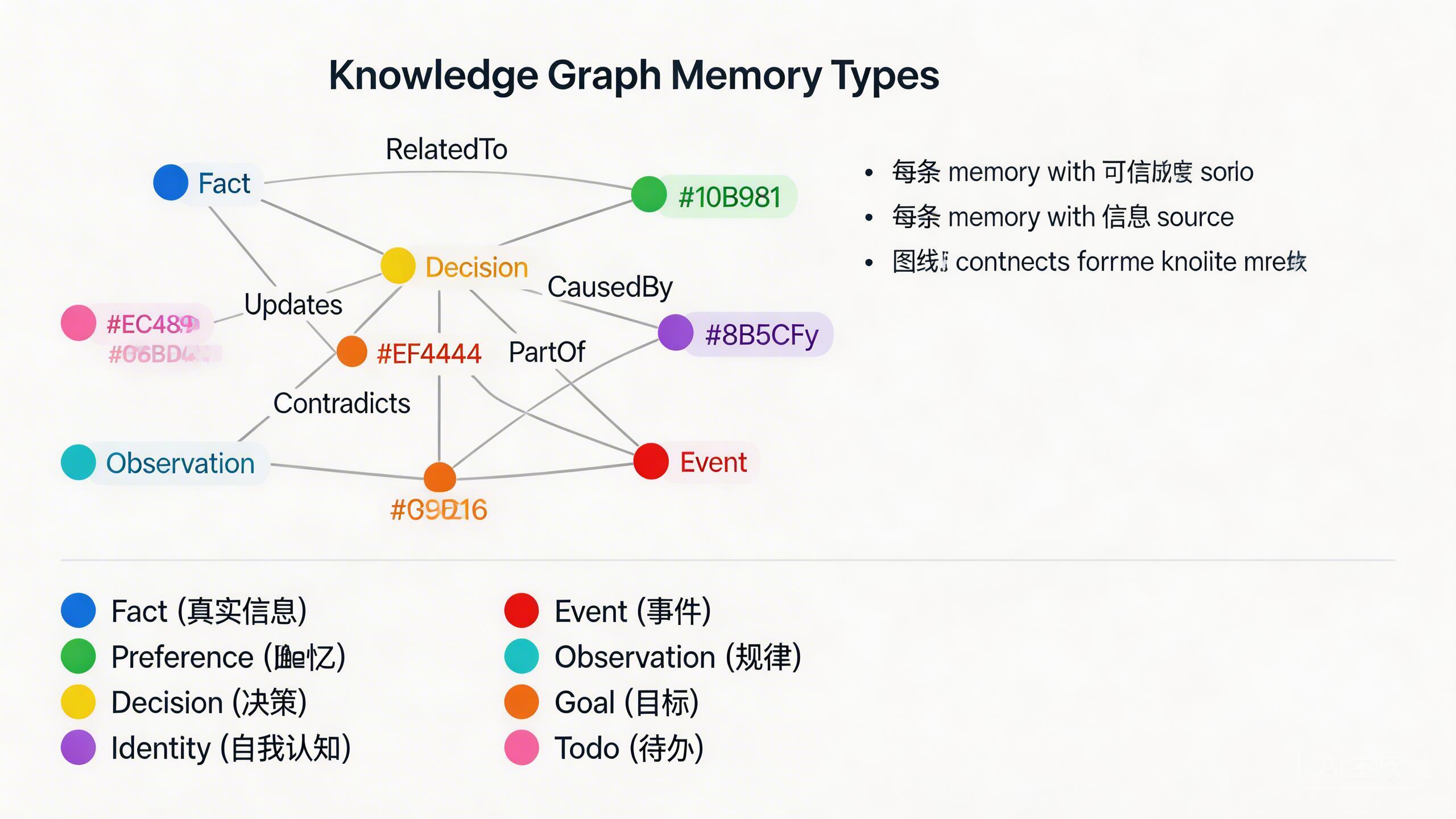
更关键的是,每条记忆都带有可信度评分和信息来源。你可以清楚地看到 agent 的某个判断是高度确定的还是存疑的,这个判断是从哪次对话里提取出来的。
openclaw 是个黑盒,你不知道它记住了什么。spacebot 是个透明箱,记忆列表就摆在你面前,每条都有出处。
Cortex:那个每小时都在整合的大脑
Cortex 是 spacebot 里最有意思的设计之一,官网单独给它列了出来:
它是一个持久运行的全局智能层,每小时对所有对话做一次跨对话知识合成,生成一份”记忆简报”(memory bulletin),然后把这份简报注入到每个 agent 对话的上下文里。
这意味着什么?
假设你今天上午在某个频道问过 bot 一个问题,下午在另一个频道提到了相关的事,Cortex 会在下一次合成时把这两条信息关联起来,形成一条新的图谱边。你甚至不用”提醒”它,它自己会发现这个连接。
Cortex 还负责:
- 监控所有 Channel / Worker / Branch 的运行状态
- 杀死卡死的进程,清理僵尸 Branch
- 维护记忆图谱的 decay 和 pruning(陈旧记忆逐渐降权清除)
- 检测跨对话的行为模式
通过 admin chat 可以直接问 Cortex:“你现在的全局目标是什么?你观察到了什么跨对话的规律?当前有哪些待办?“它会如实汇报,因为这本来就是它的职责:做全局的记忆管家和系统守卫。
记忆召回不靠运气
openclaw 那类方案的记忆大多是简单的”把最近 N 条对话塞进 context”,或者最多做个基础向量检索。时间一长,context 撑满了,该记住的忘了,不重要的反而占着位置。
spacebot 的记忆召回使用混合检索(Hybrid Recall):向量相似度搜索 + 全文关键词搜索,通过 Reciprocal Rank Fusion 算法融合排序。两种检索互补——向量搜索找语义相关的,全文搜索找精确匹配的,融合之后你得到的是”既相关又准确”的记忆,而不是”勉强相关”的噪声。
另外,spacebot 还支持文件直接摄入记忆:把你的 markdown、日志、YAML、JSON 文件丢给它,它自动提取结构化记忆,写进知识图谱。你的项目文档、历史记录、配置文件,都可以成为 agent 的知识来源。
顺便一提:模型路由和提供商支持
spacebot 支持 10 个 LLM 提供商:Anthropic、OpenAI、OpenRouter、Groq、Mistral、DeepSeek、Fireworks、Together、xAI、Zhipu。
不是那种”我也支持这个”的表面兼容,而是内置了四层自动路由系统:
- 进程类型默认:Channel 对话用中等模型,Worker 执行用快模型,Compactor 压缩用最便宜的
- 任务类型覆盖:写代码这类专业任务自动升级到更强的模型
- 提示词复杂度评分:简单问题路由到省钱模型,复杂推理路由到强模型
- Fallback 链:某个模型返回限速或报错,自动切换到下一个候选
你不用手动管”这个问题用哪个模型”,系统在质量和成本之间自动找平衡。
安全:你的凭据不会乱跑
用 agent 执行任务,最让人担心的是”它会不会把我的 API key 发出去”。
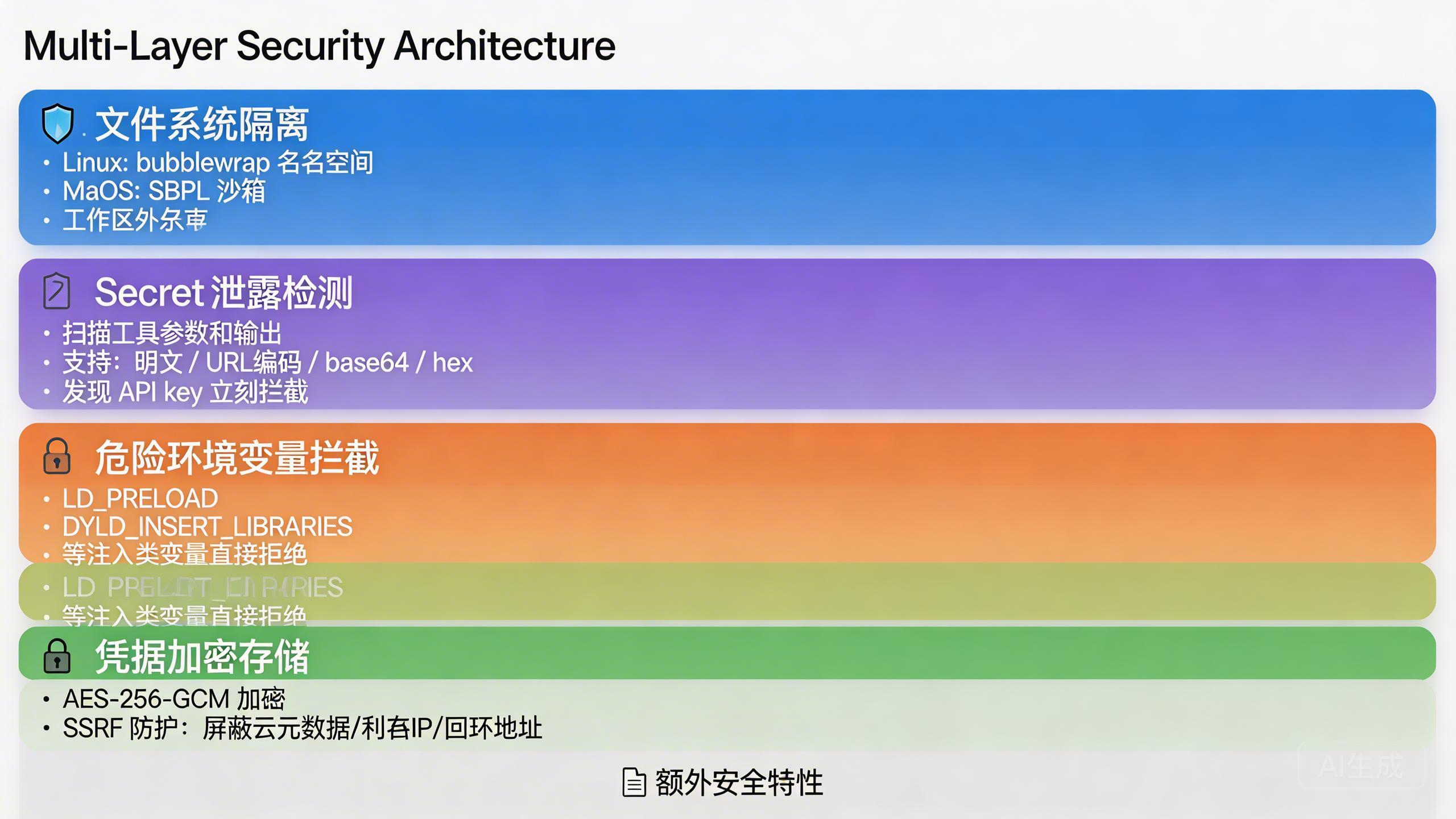
spacebot 的安全设计非常细致:
- 文件系统隔离:Linux 用 bubblewrap 挂载命名空间,macOS 用 SBPL 沙箱,工作区外只读
- Secret 泄露检测:扫描工具参数和输出,覆盖明文、URL 编码、base64、hex 四种格式,发现 API key 立刻拦截
- 危险环境变量拦截:
LD_PRELOAD、DYLD_INSERT_LIBRARIES等注入类变量直接拒绝 - SSRF 防护:浏览器工具屏蔽云元数据地址、私有 IP、回环地址
- 凭据加密存储:所有 secrets 用 AES-256-GCM 加密
定价与部署
托管方案(无需自己维护服务器):
| 方案 | 价格 | 实例数 | Agent 数 |
|---|---|---|---|
| Pod | $29/月 | 1 | 3 |
| Outpost | $59/月 | 2 | 6 |
| Nebula | $129/月 | 5 | 12 |
| Titan | $499/月 | 10 | 无限 |
自托管(开源免费):
| 方案 | 价格 | 说明 |
|---|---|---|
| Community | 免费 | 完整功能,自己维护 |
| Basic Support | $59/月 | 共享支持频道 |
| Priority Support | $299/月 | 专属支持 + SLA |
| Enterprise | 定制 | SSO/SAML + 自定义合同 |
如果你只是个人用,自托管免费版就够了。如果是团队使用,$29/月的 Pod 方案性价比不错。
快速上手:3 分钟跑起来
方式一:一键托管脚本
curl -sSf https://spacebot.sh | sh按向导走完就能用,无需自己维护服务器。
方式二:本地自托管
git clone https://github.com/spacedriveapp/spacebotcd spacebotcargo build --release./target/release/spacebot start单一二进制,无运行时依赖,无 node_modules,无 Python 虚拟环境。一个文件,扔哪里都能跑。
方式三:Docker
docker run -v spacebot-data:/data ghcr.io/spacedriveapp/spacebot挂卷持久化,重启不丢记忆。
技能管理:
spacebot skill add owner/repo # 从社区注册表安装技能spacebot skill list # 查看已安装技能技能系统和 openclaw 生态兼容,已有的 openclaw 技能可以直接迁移,迁移成本几乎为零。
两者对比,一目了然
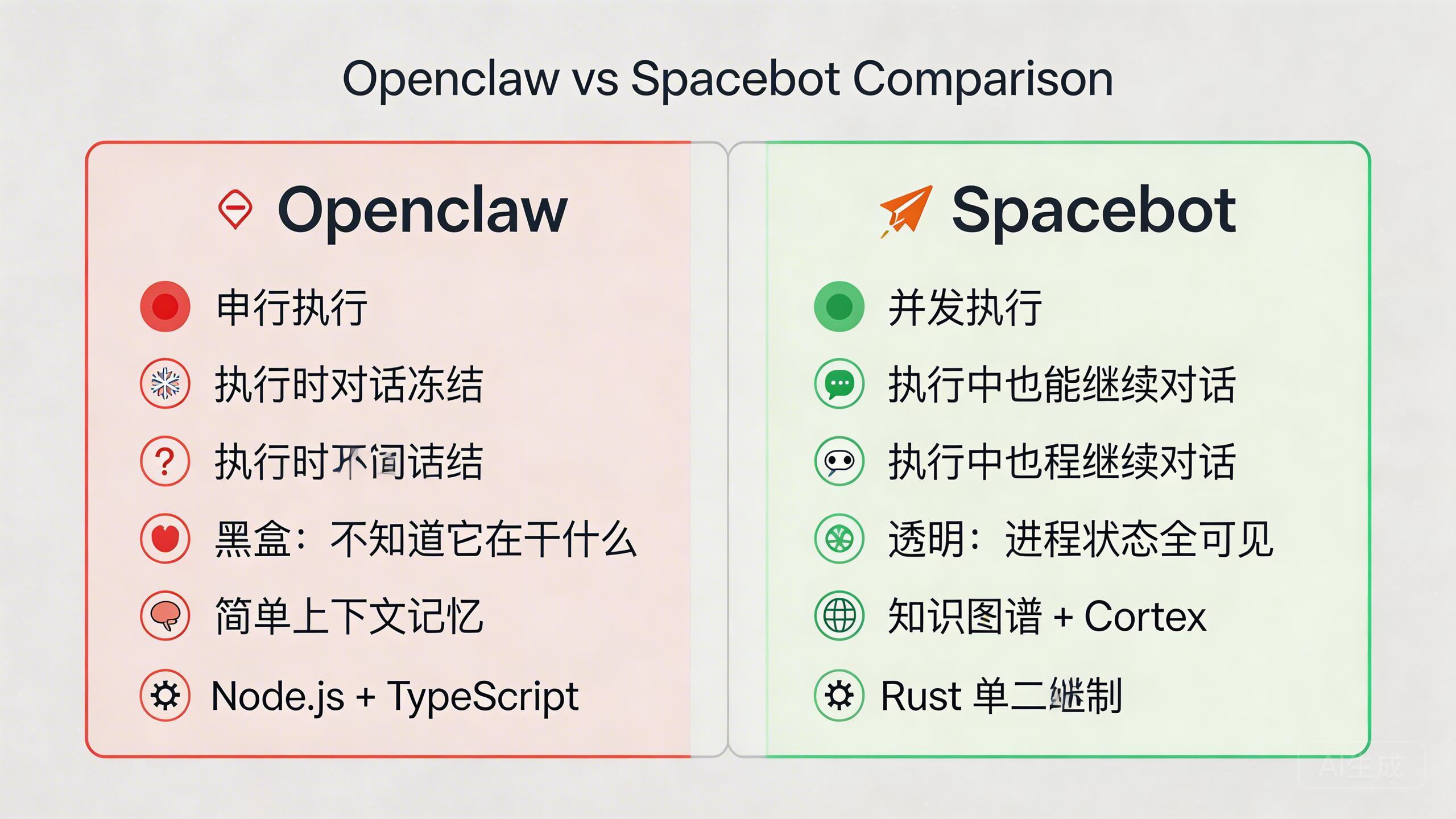
| 维度 | openclaw | spacebot |
|---|---|---|
| 定位 | 个人 AI 助手平台 | AI Operating System for Teams |
| 语言/运行时 | Node.js / TypeScript | Rust(单二进制) |
| 执行模型 | 串行,执行时阻塞 | 并发,五层进程互不阻塞 |
| 执行中能否对话 | ❌ 冻结 | ✅ 随时响应 |
| 记忆系统 | 简单上下文 / 基础向量 | 结构化知识图谱,8 种记忆类型 |
| 跨对话记忆 | ❌ | ✅ Cortex 每小时合成简报 |
| 记忆可信度 | ❌ 无 | ✅ 每条记忆带可信度 + 来源 |
| 内部状态可见性 | ❌ 黑盒 | ✅ Worker/Branch/记忆全可观察 |
| 模型提供商 | 部分兼容 | 10 个,内置自动路由 |
| 文件摄入记忆 | ❌ | ✅ markdown/logs/YAML/JSON |
| 安全沙箱 | 基础 | 多层:文件隔离 + Secret 检测 + SSRF 防护 |
| 部署方式 | npm + 本地网关 | 单二进制 / Docker / 托管云 |
| 自托管价格 | 免费 | 免费(开源) |
| 适合场景 | 个人尝鲜 | 团队协作,生产环境,重度使用 |
结语
openclaw 能跑,但你用它的体验是:等待 + 猜测。等它执行完,猜它在干什么。
spacebot 给你的是另一种工程哲学:流畅 + 透明。
它干活的时候你还能聊天。它的每一个决策都摆在你面前。它记住的每一件事都有出处和可信度。它的 Cortex 每小时在帮你整合跨对话的知识,你甚至不需要提醒它”上次我们聊过这个”。
这才是一个真正能用的 agent 应该有的样子。
弃坑不丢人,选对工具才是正事。
spacebot:github.com/spacedriveapp/spacebot · 1.5k stars · Rust · spacebot.sh openclaw:github.com/openclaw/openclaw · Node.js
